
Khawaja Ghulam Alamdar
About Me
I am a researcher at the Laboratory for Robotics and Intelligent Control Systems (LARICS), FER, at the University of Zagreb, focusing on multi-robot systems for search and rescue missions. Last summer, I graduated with a Master’s in Intelligent Field Robotic Systems (IFRoS) from the Erasmus Mundus program. My academic journey culminated in a master’s thesis also at LARICS, where I focused on connectivity maintenance of ad-hoc UAV networks for multi-robot missions.
I hold an undergraduate degree in Electrical Engineering, with a focus on robotics and computer vision, from Habib University in 2022.
With a strong background in autonomous systems, multi-robot systems, and computer vision, I have honed my skills in various programming languages and software tools, including ROS/ROS 2, Gazebo, MATLAB, Python, and C++.
Research Interests
- Robotics: autonomous systems, autonomous exploration, disaster robotics
- Muli-robot Systems: decentralized control, connectivity maintainance control
News
- [May. 2025] Our paper titled “Decentralized Battery-Aware Connectivity Maintenance for Multi-UAV Missions” is accepted in IEEE Access.
- [Feb. 2025] Started working as a researcher at the LARICS.
- [Jun. 2024] Completed Master’s in Intelligent Field Robotic Systems (IFRoS)
- [Mar. 2024] Began graduate thesis at LARICS at the University of Zagreb, focusing on connectivity maintenance of ad-hoc UAV networks for multi-robot missions.
- [Oct. 2023] Joined the University of Zagreb for the third semester of EMJD IFRoS Masters, specializing in aerial robotics and multi-robot systems.
- [Dec. 2022] Presented my first first-authored work, “Frontier Exploration for Disaster Management UAVs”, remotely at the 2022 IEEE International Conference on Robotics and Biomimetics (ROBIO).
- [Sept. 2022] Started the first year of the EMJD IFRoS Masters at the University of Girona.
- [Jun. 2022] Graduated from Habib University with the highest academic achievement in the EE class of 2022 and received the best undergraduate thesis award.
Publications

Projects
-
 Connectivity Maintenance in Ad-hoc UAV Networks for Multi-robot MissionsMaster’s Thesis - University of Zagreb (2024)Modified a classic connectivity controller to include battery awareness and fault tolerance for a swarm of UAVs. Analyzed the feasibility of Graph Neural Networks (GNNs) for imitation learning. Demonstrated a full fleet management system using Bitcraze Crazyflie UAVs.
Connectivity Maintenance in Ad-hoc UAV Networks for Multi-robot MissionsMaster’s Thesis - University of Zagreb (2024)Modified a classic connectivity controller to include battery awareness and fault tolerance for a swarm of UAVs. Analyzed the feasibility of Graph Neural Networks (GNNs) for imitation learning. Demonstrated a full fleet management system using Bitcraze Crazyflie UAVs. -
 Autonomous Pick and Place using TurtleBotUniversitat de Girona (2023)Implemented multiple frontier selection and path planning algorithms with smoothing techniques. Integrated with self-implemented SLAM for mapping and localization, enabling fully autonomous pick-and-place.
Autonomous Pick and Place using TurtleBotUniversitat de Girona (2023)Implemented multiple frontier selection and path planning algorithms with smoothing techniques. Integrated with self-implemented SLAM for mapping and localization, enabling fully autonomous pick-and-place. -
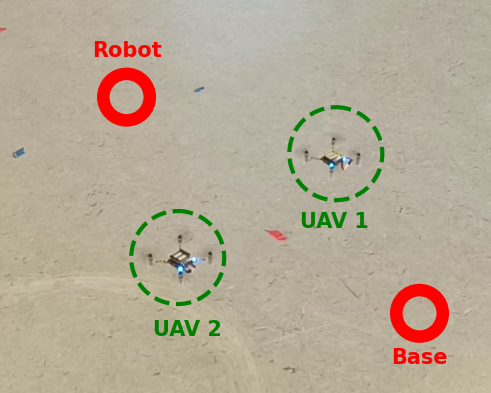
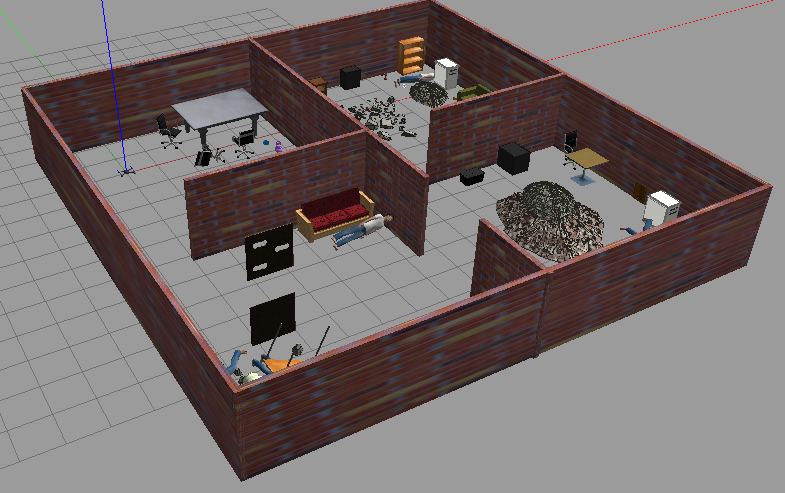
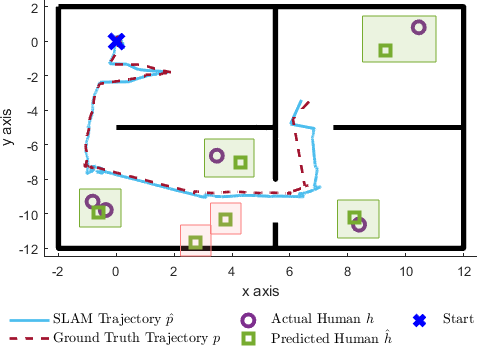
 Autonomous Mapping and Human Localization for Indoor Disaster Management UAVsBachelor’s Thesis - Habib University (2022)Developed an exploration algorithm tailored for UAVs in GPS-denied environments. Implemented a module to detect and localize human survivors using YoloV3. Simulated using a PX4 quadrotor in disaster-like environments.
Autonomous Mapping and Human Localization for Indoor Disaster Management UAVsBachelor’s Thesis - Habib University (2022)Developed an exploration algorithm tailored for UAVs in GPS-denied environments. Implemented a module to detect and localize human survivors using YoloV3. Simulated using a PX4 quadrotor in disaster-like environments. -
 WHEEL-E: A Self-Balancing RobotHabib University (2020)A self balancing robot developed as the final project for Principles of Feedback Control course in spring 2020 semester. The bot was capable of (modestly) balancing itself and maintaining upright position on 2 wheels. Arduino UNO R3 along with MPU6050, L298N motor driver and Pololu gear motors were used in this built. PID algorithm was implemented to balance the bot.
WHEEL-E: A Self-Balancing RobotHabib University (2020)A self balancing robot developed as the final project for Principles of Feedback Control course in spring 2020 semester. The bot was capable of (modestly) balancing itself and maintaining upright position on 2 wheels. Arduino UNO R3 along with MPU6050, L298N motor driver and Pololu gear motors were used in this built. PID algorithm was implemented to balance the bot. -
 Mariana Trench FishingHabib University (2020)A fishing game developed as the final project for the Object Oriented Programming (OOP) course in Spring 2020. Developed using C++ and SDL library.
Mariana Trench FishingHabib University (2020)A fishing game developed as the final project for the Object Oriented Programming (OOP) course in Spring 2020. Developed using C++ and SDL library.
Powered by Jekyll and Minimal Light theme.